
随着越来越多的企业踏上自动化升级之路,人工上下料的工作已经逐渐被工业机器人所替代。
这些工业机器人依照设定的程序执行稳定的重复性的工作,在提高生产效率,降低人工成本,避免安全事故等方面发挥着重要作用。然而面对复杂散乱、无序堆叠的搬运场景时,工业生产环节又对机器人的自动化技术提出了更高的要求。
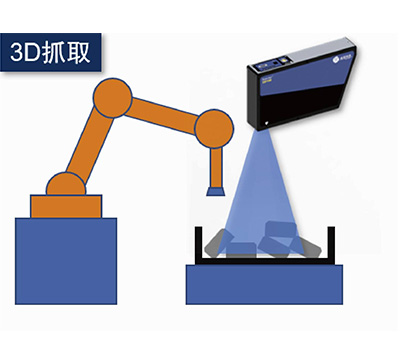
3D引导机械手无序抓取解决方案采用3D成像系统对工件表面进行三维数据的采集、分析、识别,计算得到工件的实时坐标并且转化为机器人坐标后,机器人再依此进行最优路径的规划从而完成散乱工件的抓取。
3D引导机械手无序抓取解决方案使用3D相机定位任意摆放产品,引导机械手抓取实现自动上料,适用于各种视觉引导定位项目。




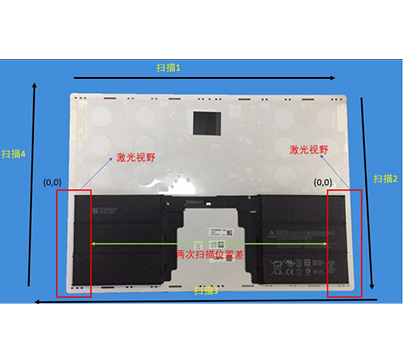
不需要校准,首先扫描产品的4条外边(扫描点距可以设置比较大以实现快速扫描),根据运动轴的点位差值以及在单独视野抓边来建立纵向和横向的中线(需要各建一个坐标系)